FRDM-MCXN236 and OV5640
I’ve had trouble with this set up before, seems to me everytime I try and set up a board the first time it never works. However when I come back for another pass things are usually very straight forward, today my experience with the MCXN236 has been the same.
Perhaps I was in a rush, perhaps I need more patience?
Regardless, let’s actually explore. My objective today is to hook up a camera to the MCXN236 specifically the OV5640. Then try and see if we can achieve some UVC video as well, see if we can use libmpix to do some signal processing on the videos themselves.
Let’s begin.
Setup
To start with lets get the board and try and run some zephyr samples on it.
- Install and setup LinkServer tools as linked in the Zephyr Board Page
- Build and flash a basic blinky application onto the board
west build -b frdm_mcxn236 zephyr/samples/basic/blinky --pristine ... west flash - The above should give you a red blinking, not very exciting, I know!
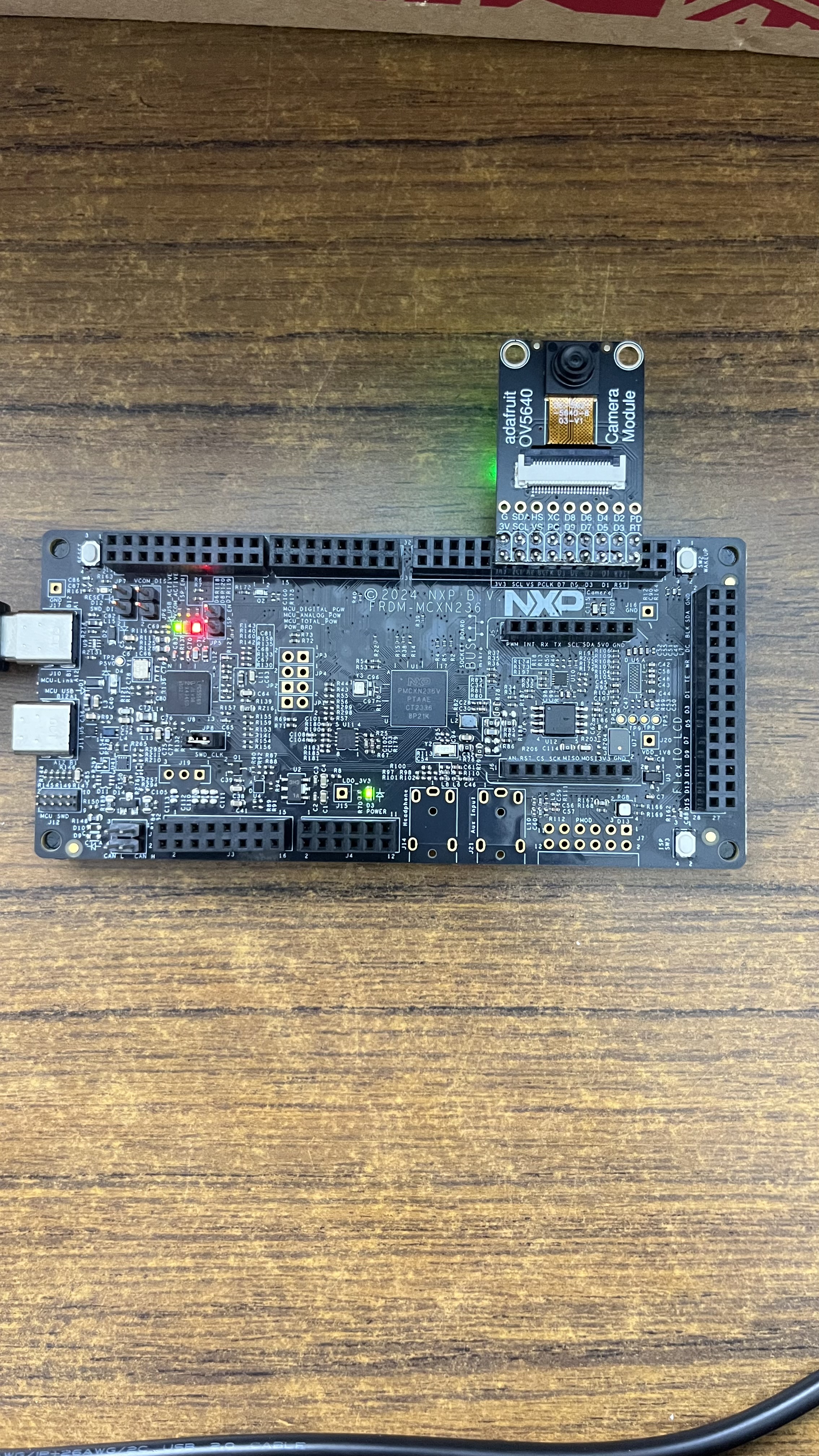
- Acquire the OV5640 Camera module and have it ready, infact you can connect it up
the board as follows, connecting the camera should light up the green LED on the back of the
camera module. This means
power good.
Ok so thats our hardware all setup, let’s see if we can configure the camera and get some captures from it.
Overlays & Configuration
In order for this to work with as little effort as possible lets first ensure that a few items exist.
- A video driver for this MCU and indeed we have a SDMA Driver
- A driver for our image sensor module OV5640 Driver
With these 2 now the issue becomes plumbing the data from the image sensor via sdma to
some chosen zephyr,camera node, this should enable us to get the video subsytem working
- Setup the camera itself on the
dvp_i2cblock as follows
&dvp_20pin_i2c {
ov5640: ov5640@3c {
compatible = "ovti,ov5640";
reg = <0x3c>
#reset-gpios
#power-down-gpios
port {
ov5640_ep_out: endpoint {
remote-endpoint-label = "ov5640_sdma_ep_in";
};
};
};
};
- Send the camera data from the
dvp_i2cblock to thedvp_sdmablock as follows
&dvp_20pin_interface {
status = "okay";
port {
ov5640_sdma_ep_in: endpoint {
remote-endpoint-label = "ov5640_ep_out";
};
};
};
- Set the chosen
zephyr,cameranode.
#include <zephyr/dt-bindings/video/video-interfaces.h>
/ {
/*Chosen cam node*/
chosen {
zephyr,console = &flexcomm0_lpuart0;
zephyr,shell-uart = &flexcomm0_lpuart0;
zephyr,camera = &dvp_20pin_interface;
};
};
### TODO: File an issue and likely work on a PR for this.
This all currently works, however it fails with the following when it is time to capture
*** Booting Zephyr OS build v4.2.0-4812-g48a9b04885cb ***
[00:00:00.125,000] <inf> main: Video device: video-sdma
[00:00:00.125,000] <inf> main: - Capabilities:
[00:00:00.125,000] <inf> main: RGBP width [320; 320; 0] height [240; 240; 0]
[00:00:00.125,000] <err> main: Unable to retrieve video format
We filed a PR and a fixed the above see a complete repository below.
Now one can expect the log below
uart:~$
*** Booting Zephyr OS build v4.3.0-rc2-96-g8b2c75a2fbe4 ***
[00:00:00.126,000] <inf> main: Video device: video-sdma
[00:00:00.126,000] <inf> main: - Capabilities:
[00:00:00.126,000] <inf> main: RGBP width [320; 320; 0] height [240; 240; 0]
[00:00:00.126,000] <inf> main: - Video format: RGBP 320x240
[00:00:00.140,000] <inf> main: - Supported frame intervals for the default format:
[00:00:00.140,000] <wrn> main: The video source does not support frame rate control
[00:00:00.140,000] <inf> main: - Supported controls:
[00:00:00.140,000] <inf> main: device: ov5640@3c
[00:00:00.140,000] <inf> video_ctrls: Brightness 0x00980900 (int) (flags=0x00) : min=-15 max=15 step=1 default=0 value=0
[00:00:00.140,000] <inf> video_ctrls: Contrast 0x00980901 (int) (flags=0x00) : min=0 max=255 step=1 default=0 value=0
[00:00:00.140,000] <inf> video_ctrls: Saturation 0x00980902 (int) (flags=0x00) : min=0 max=255 step=1 default=64 value=64
[00:00:00.140,000] <inf> video_ctrls: Hue 0x00980903 (int) (flags=0x00) : min=0 max=359 step=1 default=0 value=0
[00:00:00.140,000] <inf> video_ctrls: Gain, Automatic 0x00980912 (bool) (flags=0x10) : min=0 max=1 step=1 default=1 value=1
[00:00:00.140,000] <inf> video_ctrls: Horizontal Flip 0x00980914 (bool) (flags=0x00) : min=0 max=1 step=1 default=0 value=0
[00:00:00.140,000] <inf> video_ctrls: Vertical Flip 0x00980915 (bool) (flags=0x00) : min=0 max=1 step=1 default=0 value=0
[00:00:00.140,000] <inf> video_ctrls: Power Line Frequency 0x00980918 (menu) (flags=0x00) : min=0 max=3 step=1 default=1 value=1
[00:00:00.140,000] <inf> video_ctrls: 0: Disabled
[00:00:00.140,000] <inf> video_ctrls: 1: 50 Hz
[00:00:00.140,000] <inf> video_ctrls: 2: 60 Hz
[00:00:00.140,000] <inf> video_ctrls: 3: Auto
[00:00:00.141,000] <inf> video_ctrls: Analogue Gain 0x009e0903 (int) (flags=0x0c) : min=0 max=1023 step=1 default=0 value=16
[00:00:00.141,000] <inf> video_ctrls: Pixel Rate 0x009f0902 (int64) (flags=0x01) : min=24000000 max=96000000 step=1 default=48000000 value=24000000
[00:00:00.141,000] <inf> video_ctrls: Test Pattern 0x009f0903 (menu) (flags=0x00) : min=0 max=4 step=1 default=0 value=0
[00:00:00.141,000] <inf> video_ctrls: 0: Disabled
[00:00:00.141,000] <inf> video_ctrls: 1: Color bars
[00:00:00.141,000] <inf> video_ctrls: 2: Color bars with rolling bar
[00:00:00.141,000] <inf> video_ctrls: 3: Color squares
[00:00:00.141,000] <inf> video_ctrls: 4: Color squares with rolling bar
[00:00:00.141,000] <inf> main: Capture started
Device Emulation Reference
https://www.youtube.com/watch?v=usXCAXR2G_c